Also be sure to read this other post for a comprehensive explanation of how the Earth’s Past and Present Global Temperatures Clearly Follow Known Patterns. DON’T MISS IT for a full understanding of the proven science.
“How in the Universe to you Connect Global Warming to Human Caused CO2?”
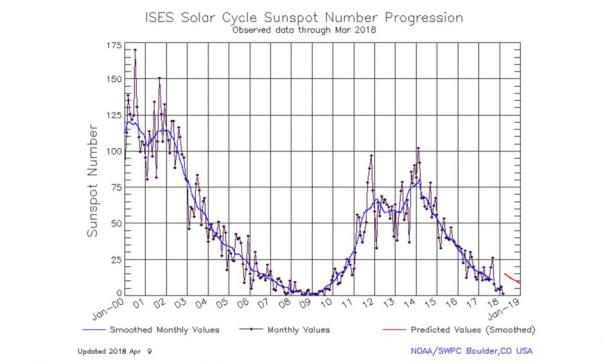
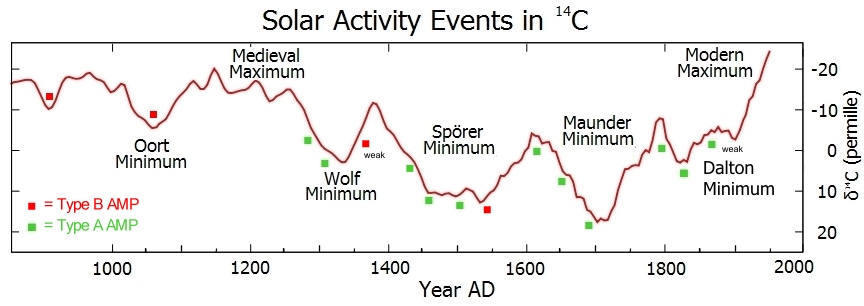 We are quickly entering a period of deadly cold on Planet Earth. NASA’s own Sunspot Tracking page makes specific note of the similarity between today’s declining Sunspot activity and a similar event the lasted from the year 1645 to the year 1715 called the “Maunder Minimum”. This period in history is known for cold weather that made growing food difficult or impossible in Europe and North America. Disease and Famine and resulting Wars racked the planet. Theodor Landscheidt was first to correlate these times with Solar Sunspot activity and El Nino/La Nina events to accurately predict temperatures in the Northern Half of the Earth. Carl Smith and Geoff Sharp found the influence of the large planets Jupiter, Saturn, Neptune, and Uranus on the Sun. The gravity of these huge planets tug on the sun, influencing the Sunspot cycles. The Solar activity cycles control the Cosmic Rays that govern cloud cover on Earth. Henrik Svensmark demonstrated the clear Corrolation that increased Cosmic Rays increase Cloud Formation. Cloud formation releases vast amounts of Warm Water Vapor heat into space, and the tops of clouds reflect 90% of the Sun’s Heating Radiation. Water Vapor is 95% of the Earth’s Greenhouse Gasses. Together, Landscheidt, and Smith, Sharp and Svensmark predict we are entering into a mini ice age similar to the Maunder Minimum, that could last 30 years or more.
We are quickly entering a period of deadly cold on Planet Earth. NASA’s own Sunspot Tracking page makes specific note of the similarity between today’s declining Sunspot activity and a similar event the lasted from the year 1645 to the year 1715 called the “Maunder Minimum”. This period in history is known for cold weather that made growing food difficult or impossible in Europe and North America. Disease and Famine and resulting Wars racked the planet. Theodor Landscheidt was first to correlate these times with Solar Sunspot activity and El Nino/La Nina events to accurately predict temperatures in the Northern Half of the Earth. Carl Smith and Geoff Sharp found the influence of the large planets Jupiter, Saturn, Neptune, and Uranus on the Sun. The gravity of these huge planets tug on the sun, influencing the Sunspot cycles. The Solar activity cycles control the Cosmic Rays that govern cloud cover on Earth. Henrik Svensmark demonstrated the clear Corrolation that increased Cosmic Rays increase Cloud Formation. Cloud formation releases vast amounts of Warm Water Vapor heat into space, and the tops of clouds reflect 90% of the Sun’s Heating Radiation. Water Vapor is 95% of the Earth’s Greenhouse Gasses. Together, Landscheidt, and Smith, Sharp and Svensmark predict we are entering into a mini ice age similar to the Maunder Minimum, that could last 30 years or more.
Direct Evidence for this cooling has been provided by Calibrated Satellite temperature measurements of the entire Earth, something that NASA’s thermometers on the surface cannot do. These satellite temperature measurements show a slight cooling that began in 2003, not the warming that NASA/NOAA claims from surface thermometers they adjust to make warming appear. If the Landscheidt predictions are correct, we are tipping into a period of deadly cooling, not uncomfortable warming as predicted by the IPCC International Panel on Climate Change at the United Nations. The IPCC are not scientists. They are Politicians who pay scientists. They are getting what they pay for. They are getting more predictions of Global Warming, when it is not warming.
As the real trend of cooling continues, we will need all the energy sources we can find to compensate, including renewables and non-renewables. Politics and science have teamed up in the past to predict future cold and warm periods. They have always been wrong because the scientific mechanism was not fully understood. This includes the current “Global Warming” or “Climate Change” predictions. Look back at them and see how many of their predictions have come true. NONE of them have come true. Decide then for yourself who to believe.
Now we finally have a scientific explanation for these warm and cool periods, and it does not seem to follow the amount of CO2 in the atmosphere. Instead, CO2 FOLLOWS the temperature changes with a delay of hundreds of years. Today’s Global Warming theory has them backwards. Al Gore conveniently shifted the long term graphs to make it look the other way. Check it. The only time in recent history when warming followed CO2 was a coincidence from 1974 to 2003. That was very convenient for Al Gore, a politician, not a scientist. Before that (1950s and 1960s), and after that (2004 to now), temperatures went down while CO2 went up. NASA/NOAA PUBLISHED Thermometer Records are wrong from 2003 to now, they are too hot. NASA/NOAA adjusted their RECENT measured temperatures upward, and adjusted their own previously published PAST measured temperatures downward, showing a warming trend. They did this, by adjusting their own raw surface measurements that were already verified by the very close Satellite temperature measurements. Why do they make these adjustments when their own raw data is confirmed by the satellites? Ask them, that is what they get paid for. NASA/NOAA also went back in time to adjust the past Thermometer records to make the past cooler than today. Therefore, they continue to make claims of “The Hottest Year” each year. There are other posts here on this site from other sources that clearly show this is true, including a simple presentation to Vladimir Putin from his scientists in 2004 making it very clear. It also makes it very clear that the cost of trying to change the weather is infinite if you choose CO2 as the control knob. It does not work.
This disconnect between CO2 and Global Temperatures was clearly and in detail understood as far back as the original Kyoto Protocol meeting on Climate Change in 1992, but its conclusions were against the grain of the popular Global Warming Theory then and now. The potential economic damage of pursuing CO2 reduction was also clearly understood. Here is a link to the Putin presentation that was prepared for him, not for public presentation. It was shown there once, but not well attended. Be sure to see the second half, where graphic proof of the science shows CO2 does not track with temperatures, and the Global Warming theory is flawed.
http://iccfglobal.org/ppt/Illarionov-013004.html.ppt
How Putin knew in 1992 that Global Warming Theory is Flawed
The sunspots are directly correlated with temperature cycles on the Earth. NASA themselves observed that this is true in the quote below. The mechanism is not that the sun gets brighter or dimmer, but instead, the active sun blocks cosmic rays that make clouds.
http://www.thehindu.com/todays-paper/tp-national/article1107174.ece
NASA says the Sun controls Earth Clinate
The sun is in a declining cycle of activity right now, predicted by Landscheidt, Smith, and Sharp. This means Cosmic rays are free to increase cloud cover on the Earth. To see how all of this works, see another post on this site at:
How in the Universe can CO2 control Climate?
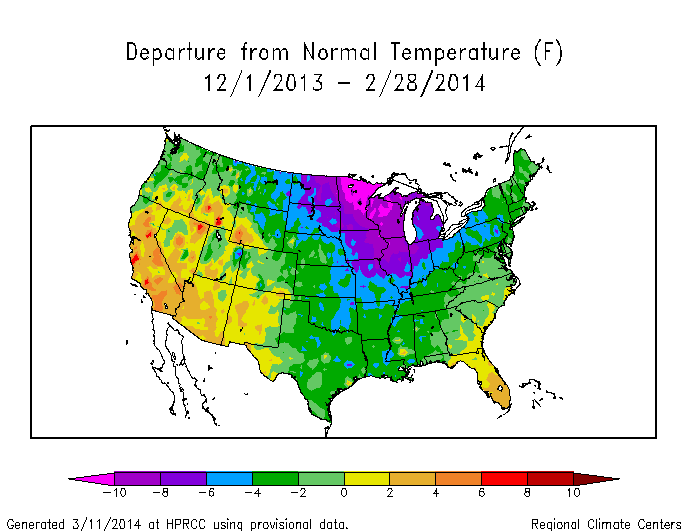
We are being prepared for the opposite temperature trend than is truly happening for political and financial gain. We will know for sure in the next few years, but the signs are already here. Polar Ice caps are back to normal and growing. Greenland is not melting. The Northwest Passage is closed. Record Cold weather events are at least as frequent than Record Warm weather events.
NASA wrote: “Early records of sunspots indicate that the Sun went through a period of inactivity in the late 17th century. Very few sunspots were seen on the Sun from about 1645 to 1715 (38 kb JPEG image). Although the observations were not as extensive as in later years, the Sun was in fact well observed during this time and this lack of sunspots is well documented. This period of solar inactivity also corresponds to a climatic period called the “Little Ice Age” when rivers that are normally ice-free froze and snow fields remained year-round at lower altitudes. There is evidence that the Sun has had similar periods of inactivity in the more distant past. The connection between solar activity and terrestrial climate is an area of on-going research.”
Here is a link to that NASA page:
http://solarscience.msfc.nasa.gov/SunspotCycle.shtml
The Quiet Sun and The Mini Iceage
NASA has since become attached to the Political Bandwagon of Global Warming supposedly caused by CO2, caused by Humans. The science for this could not be more incorrect. NASA abandoned their statement above, their understanding of the relationship between the sun’s activity and Earthly temperatures because they did not understand how it works. They observed that the sun’s brightness only varies slightly, perhaps 3%. Because of the attraction towards blaming Humans for “Climate Change”, they abandoned the clear relationship between sunspots and Earth’s Temperature. Instead, they attached themselves to the unproven theory that CO2 causes temperature changes, and they have tried to explain how the tiny amount of CO2 contributed by humans (.03% of the CO2 in the atmosphere) can make the tiny amount of CO2 itself (3% of the atmosphere) change the weather. It sounds very unlikely, doesn’t it? It is clearly a political position, not a scientific one. What more likely explanation could there be for the Earth’s temperature cycles? We must go back to NASA’s own statement above on the direct correlation between the Sunspot count and periods of deep cold or warmth on Earth.
A Meteorologist named Theodor Landscheidt (Died 2004) predicted today’s decline in Solar Activity back in 1989, and successfully predicted the weather trends that have accompanied it. His forecast is for an imminent coming period of decades where Earth’s weather will be very cold, caused by events similar to what was seen in the “Maunder Minimum” of the 1600’s. It is becoming more common to refer to today’s low Solar Activity period as the “Landscheidt Minimum”. Per Landscheidt, Smith and Sharp, we are already tipping into a dramatic cooling period that will deepen rapidly, and be very obvious in the 2020’s or before.
Here is a lin of tk to a page with Theodor Landsheidt’s papers. Note he successfully predicted recent El Nino and La Nina events.
Here is a link to a page by Geoff Sharp on the late Carl Smith’s research on the effects of the Planets tugging on the Sun. Carl’s observations, going back 6,000 years describe the empirical connection between the orbiting movement of the Planets and the Solar Activity as measured by Sunspots.
Building on Theodor Landsheidt’s work, Carl has demonstrated even greater accuracy than Landsheidt how the Sun’s activity may be explained and predicted.
Geoff Sharp has contributed, standing on the strong shoulders of Landsheidt and Smith to refine and demonstrate further the direct empirical relationship between planetary movement and the Sun’s activity, and the Earth’s climate.
CARL Smith and Geoff Sharp refine Landscheidt theory
What does this mean regarding the Earth’s weather in the future? If Theodor and Carl were right about the pattern of Solar activity we can expect in the near future, then Landscheidt’s prediction of a mini ice age in the first half of the 21st century will come true. There will be predictable effects on the Earth’s weather, including El Nino and La Nina ocean events and Global temperatures. We can expect dangerous, even deadly cooling in the next fifteen years with deeper cold and longer winters. The end will depend upon how fast the Sun recovers from the influences of the larger planets.
Here is a link to a blog with discussions on this subject, giving credit to Theodor Landsheidt for his accurate predictions in the past.
The Landscheidt Mini Iceage is Here

























{kind=link}
{kind=link}